Learning to Navigate Sidewalks in Outdoor Environments
IEEE Robotics and Automation Letters (RA-L) 2022
Abstract
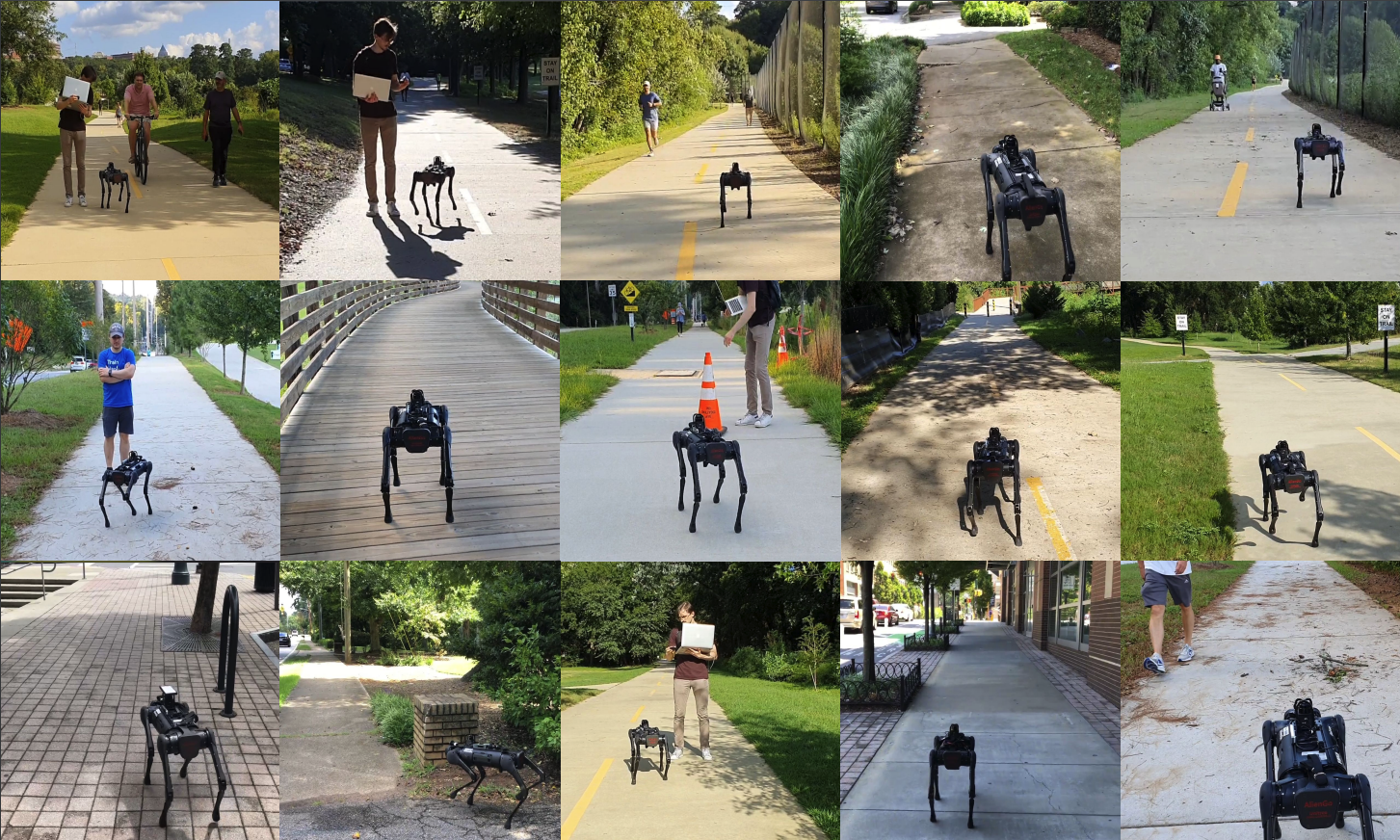
Outdoor navigation on sidewalks in urban environments is the key technology behind important human assistive applications, such as last-mile delivery or neighborhood patrol. This paper aims to develop a quadruped robot that follows a route plan generated by public map services, while remaining on sidewalks and avoiding collisions with obstacles and pedestrians. We devise a two-staged learning framework, which first trains a teacher agent in an abstract world with privileged ground-truth information, and then applies Behavior Cloning to teach the skills to a student agent who only has access to realistic sensors. The main research effort of this paper focuses on overcoming challenges when deploying the student policy on a quadruped robot in the real world. We propose methodologies for designing sensing modalities, network architectures, and training procedures to enable zero-shot policy transfer to unstructured and dynamic real outdoor environments. We evaluate our learning framework on a quadrupedal robot navigating sidewalks in the city of Atlanta, USA. Using the learned navigation policy and its onboard sensors, the robot is able to walk 3.2 kilometers with a limited number of human interventions.
Video overview
More Videos:
Speedrun
Obstacle Avoidance
Bibtex
@ARTICLE{sorokin2022learning,
author={Sorokin, Maks and Tan, Jie and Liu, C. Karen and Ha, Sehoon},
journal={IEEE Robotics and Automation Letters},
title={Learning to Navigate Sidewalks in Outdoor Environments},
year={2022},
volume={7},
number={2},
pages={3906-3913},
doi={10.1109/LRA.2022.3145947}
}